Transformations and coordinate systems#
In this notebook, we will describe some usage principles for transformations and coordinate systems in spatialdata.SpatialData.
import math
import matplotlib.pyplot as plt
import spatialdata
import spatialdata_plot # noqa: F401
from spatialdata.transformations import (
Affine,
MapAxis,
Scale,
Sequence,
Translation,
get_transformation,
set_transformation,
)
/opt/miniconda3/envs/ome/lib/python3.10/site-packages/dask/dataframe/__init__.py:31: FutureWarning: The legacy Dask DataFrame implementation is deprecated and will be removed in a future version. Set the configuration option `dataframe.query-planning` to `True` or None to enable the new Dask Dataframe implementation and silence this warning.
warnings.warn(
Please download the data from here: mouse_liver dataset and adjust the variable containing the location of the .zarr file.
sdata = spatialdata.read_zarr("./mouse_liver.zarr")
print(sdata)
SpatialData object, with associated Zarr store: /Users/macbook/embl/projects/basel/spatialdata-sandbox/mouse_liver/data.zarr
├── Images
│ └── 'raw_image': DataTree[cyx] (1, 6432, 6432), (1, 1608, 1608)
├── Labels
│ └── 'segmentation_mask': DataArray[yx] (6432, 6432)
├── Points
│ └── 'transcripts': DataFrame with shape: (<Delayed>, 3) (2D points)
├── Shapes
│ └── 'nucleus_boundaries': GeoDataFrame shape: (3375, 1) (2D shapes)
└── Tables
└── 'table': AnnData (3375, 99)
with coordinate systems:
▸ 'global', with elements:
raw_image (Images), segmentation_mask (Labels), transcripts (Points), nucleus_boundaries (Shapes)
/opt/miniconda3/envs/ome/lib/python3.10/site-packages/zarr/creation.py:614: UserWarning: ignoring keyword argument 'read_only'
compressor, fill_value = _kwargs_compat(compressor, fill_value, kwargs)
This SpatialData object consists of the following elements (among others):
an image
a segmentation mask
some nucleus boundaries
Let’s inspect the image’s elements.
Image#
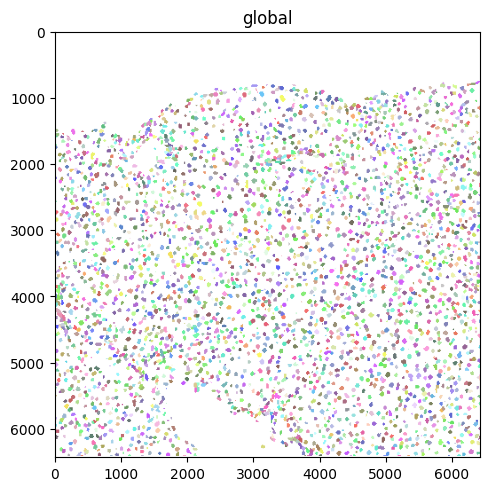
sdata.pl.render_images().pl.show()

Segmentation mask (as labels)#
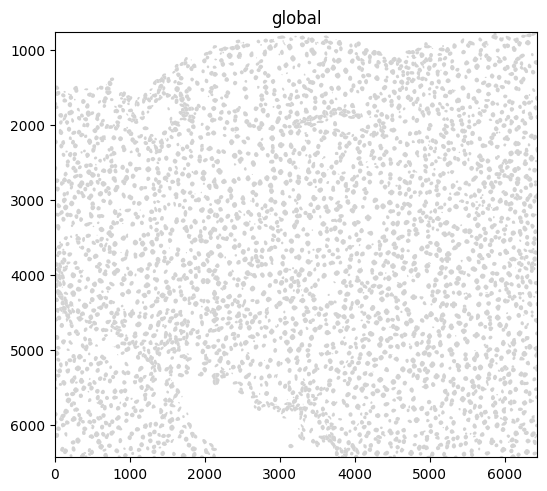
sdata.pl.render_labels().pl.show()
INFO Rasterizing image for faster rendering.
Shapes (here, polygons)#
sdata.pl.render_shapes().pl.show()
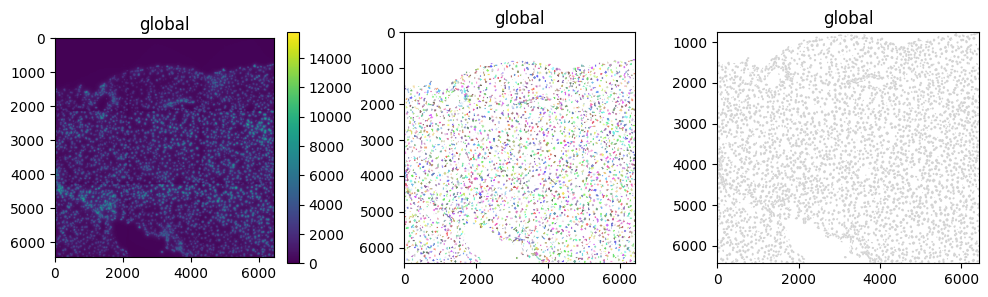
We can either plot these separately or overlay them.
fig, axs = plt.subplots(ncols=3, figsize=(12, 3))
sdata.pl.render_images().pl.show(ax=axs[0])
sdata.pl.render_labels().pl.show(ax=axs[1])
sdata.pl.render_shapes().pl.show(ax=axs[2])
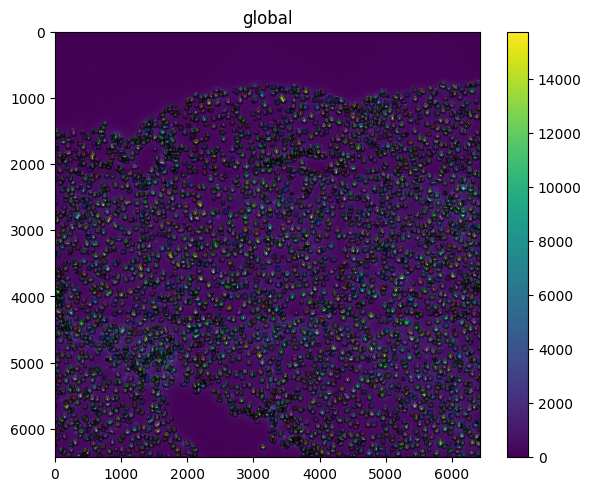
sdata.pl.render_images().pl.render_labels().pl.render_shapes(
fill_alpha=0, outline_alpha=0.5
).pl.show()
INFO Rasterizing image for faster rendering.
INFO Rasterizing image for faster rendering.
Transformations and coordinate systems#
sdata
SpatialData object, with associated Zarr store: /Users/macbook/embl/projects/basel/spatialdata-sandbox/mouse_liver/data.zarr
├── Images
│ └── 'raw_image': DataTree[cyx] (1, 6432, 6432), (1, 1608, 1608)
├── Labels
│ └── 'segmentation_mask': DataArray[yx] (6432, 6432)
├── Points
│ └── 'transcripts': DataFrame with shape: (<Delayed>, 3) (2D points)
├── Shapes
│ └── 'nucleus_boundaries': GeoDataFrame shape: (3375, 1) (2D shapes)
└── Tables
└── 'table': AnnData (3375, 99)
with coordinate systems:
▸ 'global', with elements:
raw_image (Images), segmentation_mask (Labels), transcripts (Points), nucleus_boundaries (Shapes)
In the repr printed above, you can already see that the SpatialData object contains information on coordinate systems.
Specifically, each element can be aligned to one (or more) coordinate systems via a coordinate transformation (e.g. a translation or an affine transformation). See the figure.

Some details:
with the current implementation coordinate transformations can only be specified between elements (left side of the figure) and coordinate systems (right side of the figure); they cannot be specified between elements, between coordinate systems, or between coordinate systems and elements.
if the coordinates in the intrinsic coordinate system of an element (what is called “pixel” coordinate system above) are identical to the coordinates in the coordinate system the element is located, then the element will be mapped to that cooordinate system using an
Identity()transformation.
Examples (shown in the figures below):
if you have one image and a set of points and the data is already aligned to each other (i.e. pixels and points coordinates corresponds without requiring transformations), then the configuration will be to have one coordinate system (the default name when it is not specified is called
global, and twoIdentitytransformations, each mapping one element to the common coordinate system.if you have two sets of images and two sets of points, where the image 1 is alreaedy aligned to the points 1, and the image 2 is already aligned to the points 2, then a way to represent the data is to have two coordinate systems, for instance named
sample1andsample2, and where all the 4 transformations areIdentity.finally suppose to have an image and points already aligned to the
sample1coordinate system, as explained above, but now to have also a new image to align to sample 1 that is 2 times larger (in terms of pixels). We can align it using aScaletransformations.
Notes: in the example aboves there were no rotations, nor translation (in particular the origin of all the images and points were identical); in the rest of the notebook we will examine more elaborate examples.

After this small theoretical introduction, let’s go back to our code example. There are 3 elements aligned to the global coordinate system:
raw_image: the raw DAPI image.segmentation_mask: the cell segmentation mask (raster data).nucleus_boundaries: the cell segmentation as polygons (vector data).
global is the default coordinate system that is added at the parsing stage, if no other transformation is specified. We can also expect that they are all spatialdata.transformations.Identity transformations.
Let’s print the availale coordinate systems in the SpatialData object and the transformations.
print(sdata.coordinate_systems)
print(
get_transformation(sdata["raw_image"]),
get_transformation(sdata["segmentation_mask"]),
get_transformation(sdata["nucleus_boundaries"]),
)
['global']
Identity Identity Identity
# note: the results of these two functions are identical because global is the default argument for `to_coordinate_system`
get_transformation(sdata.images["raw_image"]) == get_transformation(
sdata.images["raw_image"], to_coordinate_system="global"
)
True
Now that we understood what a transformation and a coordinate system are, let’s see how we can use them.
Let’s start by creating a new transformation, a simple spatialdata.transformations.Scale. This transformation will scale the "y" axis by a factor of 2.
scale = Scale([2.0], axes=("y",))
set_transformation(sdata.images["raw_image"], scale, to_coordinate_system="global")
sdata.pl.render_images().pl.render_shapes().pl.show()
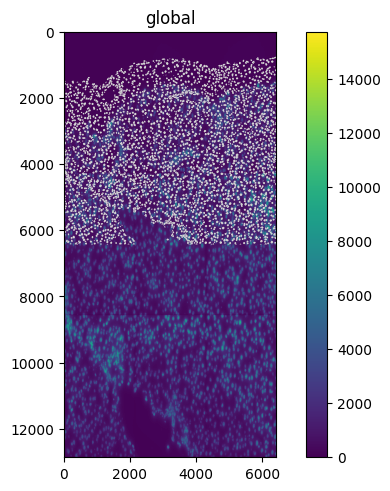
Note that our APIs allow us to apply and visualize transformations to raster and vector, with the same function call.
Various transformations#
Let’s now explore various transformations available in SpatialData.
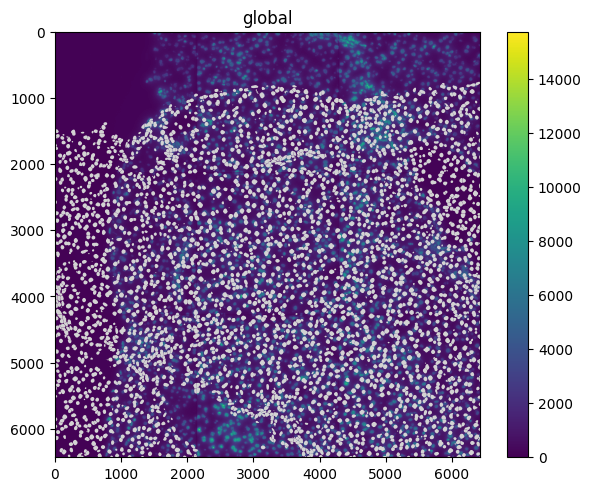
MapAxis#
The spatialdata.transformations.MapAxis transformation can be used to permute the axis of the elements.
map_axis = MapAxis({"x": "y", "y": "x"})
set_transformation(sdata.images["raw_image"], map_axis, to_coordinate_system="global")
sdata.pl.render_images().pl.render_shapes().pl.show()
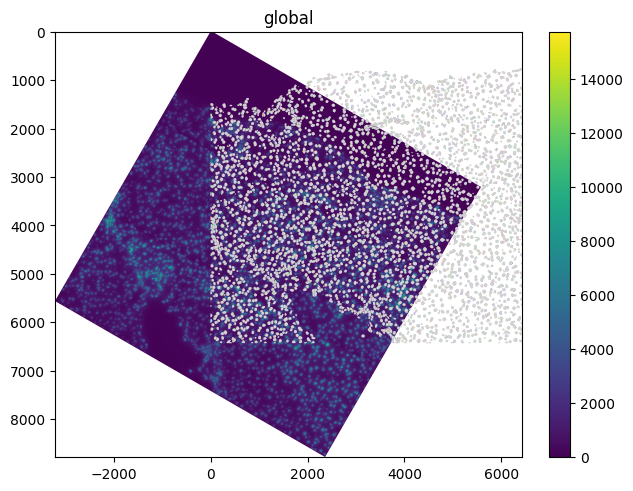
Affine#
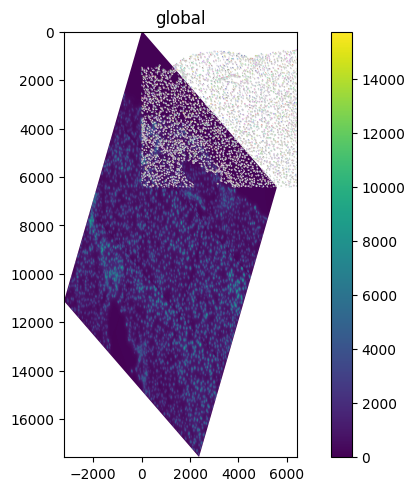
The spatialdata.transformations.Affine transformation can be used to apply an affine transformation to the elements. Let’s start with a rotation of 30 degrees (i.e. \(\pi / 6\) radians).
theta = math.pi / 6
rotation = Affine(
[
[math.cos(theta), -math.sin(theta), 0],
[math.sin(theta), math.cos(theta), 0],
[0, 0, 1],
],
input_axes=("x", "y"),
output_axes=("x", "y"),
)
set_transformation(sdata.images["raw_image"], rotation, to_coordinate_system="global")
sdata.pl.render_images().pl.render_labels().pl.render_shapes().pl.show()
INFO Rasterizing image for faster rendering.
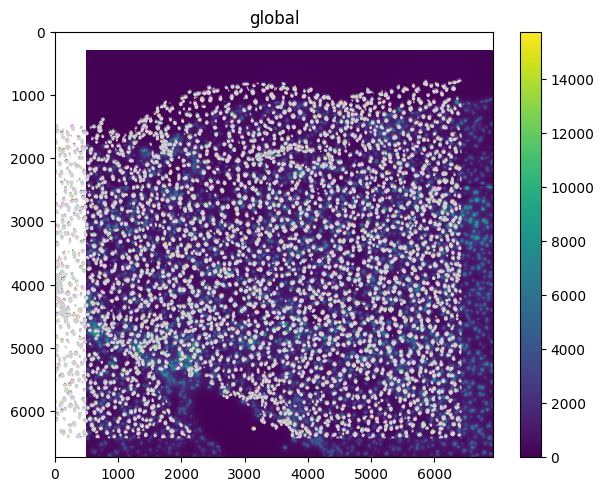
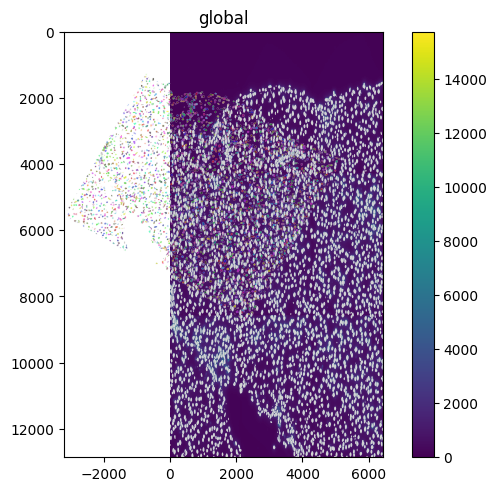
Translation#
The spatialdata.transformations.Translation transformation can be used to apply a translation to the element.
translation = Translation([500, 300], axes=("x", "y"))
set_transformation(
sdata.images["raw_image"], translation, to_coordinate_system="global"
)
sdata.pl.render_images().pl.render_labels().pl.render_shapes().pl.show()
INFO Rasterizing image for faster rendering.
Affine transformation and composition#
The spatialdata.transformations.Sequence transformation class can be used to compose transformations. This class allows to compose multiple transformations and it can be used even when the axes do not strictly match (for example here we are combining the affine rotation, defined for the ('x', 'y') axes, with the scale, defined for the ('y') axis).
sequence = Sequence([rotation, scale])
set_transformation(sdata.images["raw_image"], sequence, to_coordinate_system="global")
sdata.pl.render_images().pl.render_labels().pl.render_shapes().pl.show()
INFO Rasterizing image for faster rendering.
We can also visualize the resulting affine matrix of the transformation.
print(sequence.to_affine_matrix(input_axes=("x", "y"), output_axes=("x", "y")))
[[ 0.8660254 -0.5 0. ]
[ 1. 1.73205081 0. ]
[ 0. 0. 1. ]]
As shown before, transformations can be applied to various elements without the constraint that the axes must match.
For example, a spatialdata.transformations.Scale transformation over axis "y" can be applied both to shapes ('x', 'y') and to images ('c', 'y', 'x').
sdata
SpatialData object, with associated Zarr store: /Users/macbook/embl/projects/basel/spatialdata-sandbox/mouse_liver/data.zarr
├── Images
│ └── 'raw_image': DataTree[cyx] (1, 6432, 6432), (1, 1608, 1608)
├── Labels
│ └── 'segmentation_mask': DataArray[yx] (6432, 6432)
├── Points
│ └── 'transcripts': DataFrame with shape: (<Delayed>, 3) (2D points)
├── Shapes
│ └── 'nucleus_boundaries': GeoDataFrame shape: (3375, 1) (2D shapes)
└── Tables
└── 'table': AnnData (3375, 99)
with coordinate systems:
▸ 'global', with elements:
raw_image (Images), segmentation_mask (Labels), transcripts (Points), nucleus_boundaries (Shapes)
set_transformation(sdata["raw_image"], scale, to_coordinate_system="global")
set_transformation(sdata["nucleus_boundaries"], scale, to_coordinate_system="global")
set_transformation(sdata["segmentation_mask"], rotation, to_coordinate_system="global")
sdata.pl.render_images().pl.render_labels().pl.render_shapes().pl.show()
INFO Rasterizing image for faster rendering.
Inverse transformations#
Most of the transformations also have an inverse method that returns the inverse transformation. If composed, they effectively cancel each other out.
sequence = Sequence([rotation, rotation.inverse(), scale, scale.inverse()])
set_transformation(sdata["raw_image"], sequence, to_coordinate_system="global")
set_transformation(sdata["nucleus_boundaries"], sequence, to_coordinate_system="global")
# the image will result untransformed because the inverse transformations cancel each others
sdata.pl.render_images().pl.render_shapes().pl.show()
Some details to keep in mind#
Here are some important clarifications to make to avoid sources of confusion.
Known bug: pixel-perfectedness#
When using APIs such as transform(), rasterize() and transform_to_data_extent() (all shown below), we may get a misalignment of half-pixel magnitude. We identified the root of the problem and we will make a fix in one of the next releases.
Coordinate transformations vs transform()#
When adding/remove coordinate transformations as we showed above, we are not modifying the actual data, but just some lightweight metadata. For instance, if you add a rotation transformation to an image, the image data will not get rotated. If you want, you can call the spatialdata.transform() function to actually create a new image object with the rotated data.
Generally, applying a transformation to raster data is not recommended, and it is instead preferred to:
leave the data as it is, and let downstream methods handle the transformation. An example of this is in
spatialdata-plotandnapari-spatialdata; in these libraries we never calltransform()and rather delegate the task of transforming the data tomatplotlibandnapari, by passing to them the raw data and the transformation metadata.transform (or inverse-transform) the vector data: vector data is lighter than raster data, so transforming it is generally preferred. An example of this is in the query APIs of
spatialdata, where we want to crop an image based on an input region from a different coordinate system. To do so we do not transform the images to the query coordinate system, but rather we inverse-transform the query region to the image (“pixel”) space, and perform the query on the raw untransformed image.
